Research at the university
Research Database: Projects
Research Projects (185)
The Center for Assistive Technologies Rhein-Ruhr (De: ZAT Rhein-Ruhr) project is a comprehensive initiative focused on creating a sustainable ecosystem for assistive technologies. It encompasses infrastructure development, ethical considerations, public engagement, and financial sustainability, all with the aim of improving assistive technology research and development, teaching and transfer, thereby ensuring its widespread impact. ZAT's focus is on pro-adaptive solutions (assistive solutions that "proactively tackle adaptability") in the work, home, healthcare, mobility and education domains. The project is conducted in cooperation with Hochschule Rhein-Waal, Hochschule Niederrhein and Universität Duisburg-Essen. The North Rhine-Westphalian Ministry of Culture and Science (MKW) is funding the project with 2.7 million euros for a period of three years.
Project management at the H-BRS
Prof. Dr Teena Chakkalayil Hassan Iman Awaad
OpenSKIZZE: Open source development tools for urban development: climate impact adaptation with cooperative AI-supported decision-making processes. As an open source AI assistant, OpenSKIZZE is intended to transfer the findings from climate models into concrete construction projects. This system is intended to involve all stakeholders in the process at an early stage and inform them about the effects of their decisions on the local urban climate.
Project management at the H-BRS
Dr Alexander HaggThe aim of the project is to develop a new system approach for optical 3D imaging cameras that combines different measurement approaches in an extended measurement architecture and thus overcomes the current limitations of today's 3D cameras. The technology to be developed should enable robust and safe operation, especially in functional safety applications. To this end, the measuring range and robustness in the detection of fast movements are to be improved compared to the state of the art. The planned basic technology is the ToF camera method (time-of-flight method). FKZ: 13FH554KX1
Project management at the H-BRS
Prof. Dr Robert Lange Prof. Dr Norbert Jung
In the MigrAVE project, the objective is to develop supporting technologies for children diagnosed with Autism Spectrum Disorder (ASD). ASD is a disorder that leads to behavioural and social challenges for those affected, for instance difficulty recognising emotions, general inability to act appropriately in everyday social situations, or repetitive behaviours. Early treatment of ASD could mitigate the effects of the disorder and improve the quality of life of affected people.
Project management at the H-BRS
Professor im Ruhestand / retired professor Dr. Paul G. PlögerOur research group studies rare genetic defects in metabolic pathways. We are aiming at a better understanding of pathomechanisms underlying such inborn errors of metabolism. Many metabolic diseases result in early death or severe handicaps if they are not treated in an adequate manner. Early diagnosis is a prerequisite for therapeutic approaches, which may enable normal development in some of those diseases.
Project management at the H-BRS
Prof. Dr Jörn Oliver Sass
So called ketone bodies acetoacetic acid and (R)-3-hydroxy-n-butyric acid (bOHB) are compounds which provide the brain with fatty acid-derived energy, mainly after fasting. In recent years it has become obvious that ketone bodies can have more biological functions than just being energy carriers. Our project is devoted to such roles of ketone bodies that may also be important for pathogenesis and treatment of diseases.
Project management at the H-BRS
Prof. Dr Jörn Oliver Sass
An analysis platform consisting of four components offers a significant expansion of biomedical analysis possibilities at Hochschule Bonn-Rhein-Sieg (H-BRS). A binding analysis device based on microscaled thermophoresis contributes an innovative approach to characterising interactions involving proteins. A multi-mode detection device for UV/Vis, fluorescence and luminescence allows, among other things, a variety of enzyme activity tests and imaging studies in new or improved form. An automated patch clamp system and a system for solid-supported membrane (SSM)-based electrophysiology for high-resolution transporter studies provide the equipment basis for expanding research into membrane transport processes and other molecular mechanisms of disease development.
Project management at the H-BRS
Prof. Dr Jörn Oliver Sass
Our research group studies rare genetic defects in metabolic pathways. We are aiming at a better understanding of pathomechanisms underlying such inborn errors of metabolism. We continuously offer internships and thesis projects focused on analytical biochemistry (for example on the development of diagnostic tests) and on the characterization of metabolic diseases. Phase 2 reactions increase the water solubility of compounds and thus facilitate their excretion. This can be achieved by conjugation of a coenzyme A (coA)-activated acid for instance with an amino acid molecule.
Project management at the H-BRS
Prof. Dr Jörn Oliver Sass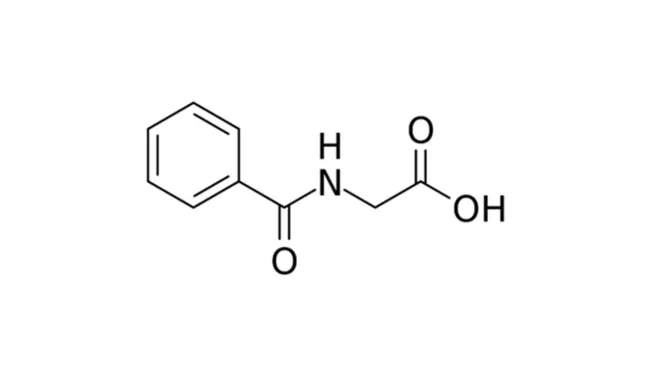
Our research group studies rare genetic defects in metabolic pathways. We are aiming at a better understanding of pathomechanisms underlying such inborn errors of metabolism (IEM). Many metabolic diseases result in early death or severe handicaps if they are not treated in an adequate manner. Early diagnosis is a prerequisite for therapeutic approaches, which may enable normal development in some of those diseases.
Project management at the H-BRS
Prof. Dr Jörn Oliver Sass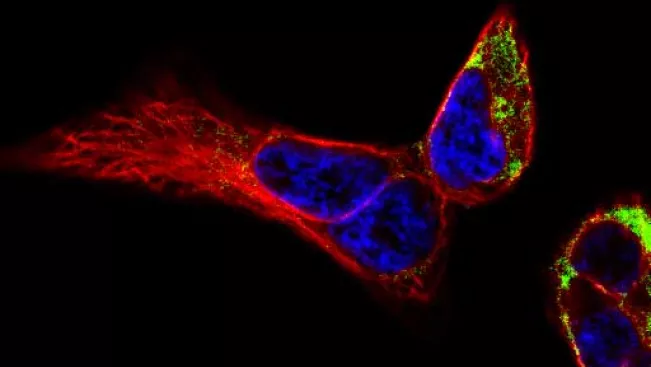
Information and communication technologies (ICT) have become part of our everyday life and it is almost impossible to imagine life without them. Reason for that is the increasing digitalization of our world. Especially in our economic sector ICTs are one of the most driving factors for innovation and therefore strongly responsible forthe competitiveness of many companies. But ICTs not only influence our lives within economy, they also shape our society e.g. in authorities.
Project management at the H-BRS
Prof. Dr Karl JonasContact Points
Centre for Science and Technology Transfer (ZWT)
Room
F 405
Vice President Research and Young Academics
Campus
Sankt Augustin