🎓Optimierung der Zuverlässigkeit und Sicherheit von 3D-Laufzeit-Kamera Systemen
Promotionsprojekt im Überblick
Fachbereiche und Institute
Zeitraum
20.11.2023 to 19.11.2028




Projektbeschreibung
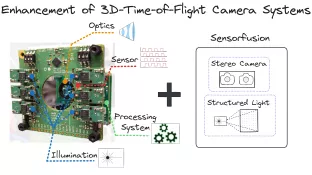
3D-Kamerasysteme gelten als Schlüsseltechnologie für zahlreiche moderne Anwendungen von der Produktinspektion bis hin zu Robotik und automatisierten Fahrzeugen. Insbesondere Laufzeitkameras (engl. Time-of-Flight, kurz ToF) ermöglichen schnelle und präzise Messungen in robusten, kompakten und kostengünstigen Systemen. Aktuelle ToF-Kameras weisen jedoch Schwächen bei der Erfassung bewegter oder stark reflektierender Objekte auf. Dies schränkt ihre Einsatzmöglichkeiten insbesondere in sicherheitskritischen Anwendungen ein.
Das Promotionsvorhaben zielt darauf ab, die Genauigkeit und Zuverlässigkeit solcher Systeme deutlich zu verbessern. Hierzu wird eine eigene Messplattform entwickelt, die eine unabhängige Untersuchung und Optimierung der Algorithmen, Optiken und laserbasierten Beleuchtungskomponenten ermöglicht. Darüber hinaus wird erforscht, wie sich ToF-Kameras mit weiteren Sensortechnologien, beispielsweise Stereokameras, kombinieren lassen, um die jeweiligen Schwächen einzelner Verfahren auszugleichen. Ziel ist die Entwicklung eines robusten 3D-Kamerasystems, das auch in sicherheitskritischen Anwendungen zuverlässig eingesetzt werden kann.