E3C
Research project at a glance
Departments and Instituts
Period
24.09.2013 to 24.02.2018
Project manager at H-BRS
Project Description
The majority of work aimed at increasing transportation efficiency is centered around engineering: whether improving the efficiency of motors, the aerodynamics of the vehicle, or reducing the weight of the entire vehicle. Only now we are approaching an era where we can look to the automatic control of the vehicle as another opportunity to reduce fuel use. As a long overlooked area, it appears that even initial advances can have large benefits. In multiple pilot programs, single-day programs training automobile drivers to drive in a more fuel-efficient fashion brought reductions of between 10% and 20% in fuel consumption. For a heavy commercial truck in Europe, each percentage decrease saves nearly 500L of gasoline in a year. By controlling our vehicles not with a few lessons from a course, but with the aid of clever algorithms, we can expect even greater improvements.
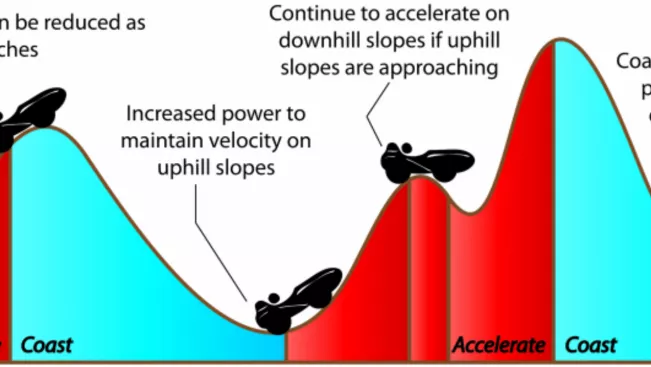
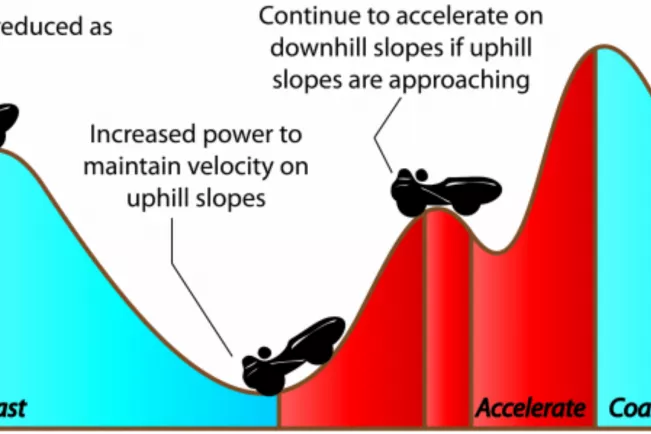
Electrically-assisted velomobiles are typically equipped with relatively weak motors. This means that the force of gravity, as it pulls the vehicle down hills, in relation to the motor, is a powerful force on the vehicle. If we already have some knowledge of the slope of the road ahead of us, we can take advantage of this information to reduce the overall energy consumption of the vehicle by driving in a way that makes the best use of the terrain. Successes in intelligently controlling our velomobiles for minimal energy use can then be applied to vehicles that are similarly affected by the terrain, such as trucks and trains.
Rather than planning the optimal control through traditional methods, which can require very large amounts of memory and struggle to perform in real time, we tackle this problem by evolving neural network controllers for the motors, which take into account the upcoming terrain and the speed of the vehicle. By iteratively applying a general controller which calculates the optimal control at the next instant, rather than attempting to find the best set of controls all at once, we can find similar solutions to traditional methods, but in a trivial amount of time and without the need for powerful hardware.
In many applications, such as physical training, logistics, and infrastructure planning, distance is merely an easily measured substitute for energy use. By observing the behavior of these controllers in simulation, we can derive an estimate of the energy which is required to travel between two locations easily and bring planners closer to their real goals. With fast adaptive controllers, we can encourage fuel efficient driving through eco-driving assistants, or fully automated cruise-control systems.
Results
Theses and Projects
- Bastian Lang: Real World Optimization of Energy Efficient Vehicle Control, Research&Development project, work in progress
- Helge Spieker: Vorausschauendes Fahren/Optimal Hybrid Control, Masterprojekt, work in progess
- Adam Gaier: Fuel Optimal Control Policies using Evolutionary Strategies, Research&Development project, 2013
Awards
-
Adam Gaier: beste Studienarbeit, DRIVE-E-Studienpreis (BMBF/Fraunhofer), 2015
(Pres press release BMBF)
Publications
- Adam Gaier and Alexander Asteroth. Evolution of optimal control for energy-efficient transport. In Intelligent Vehicles Symposium, Proceedings, pages 1121–1126. IEEE, 2014.
- Adam Gaier and Alexander Asteroth. Evolving Look Ahead Controllers for Energy Optimal Driving and Path Planning. In International Symposium on INnovations in Intelligent SysTems and Applications, Proceedings, IEEE, 2014