🎓Optimisation of the reliability and safety of 3D runtime camera systems
Doctoral project at a glance
Departments and Instituts
Period
20.11.2023 to 19.11.2028




Project Description
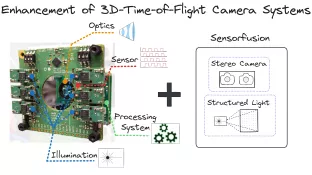
3D camera systems are considered key technology for numerous modern applications, from product inspection to robotics and automated vehicles. Time-of-flight (ToF) cameras in particular enable fast and precise measurements in robust, compact and cost-effective systems. However, current ToF cameras have weaknesses when it comes to capturing moving or highly reflective objects. This limits their potential applications, especially in safety-critical applications.
The doctoral project aims to significantly improve the accuracy and reliability of such systems. To this end, a dedicated measurement platform is being developed that will enable independent investigation and optimisation of the algorithms, optics and laser-based lighting components. In addition, research is being conducted into how ToF cameras can be combined with other sensor technologies, such as stereo cameras, to compensate for the respective weaknesses of individual methods. The aim is to develop a robust 3D camera system that can also be used reliably in safety-critical applications.