Fachbereich Ingenieurwissenschaften und Kommunikation
Industrielle Robotik

Campus
Sankt Augustin
Raum
B 014
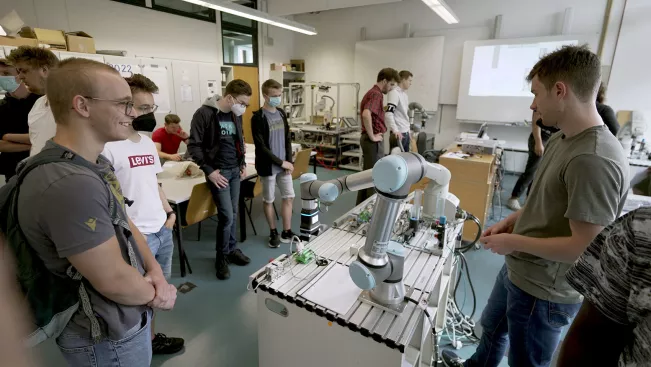
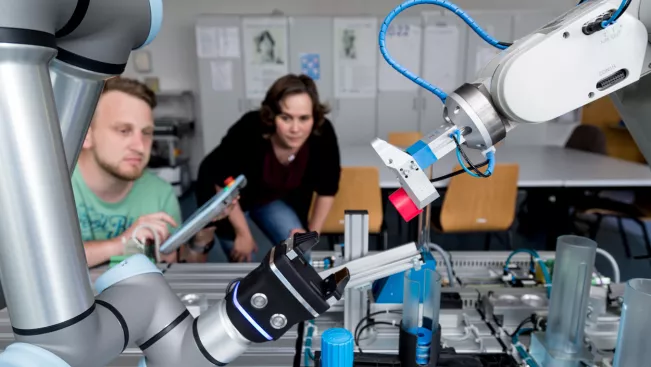
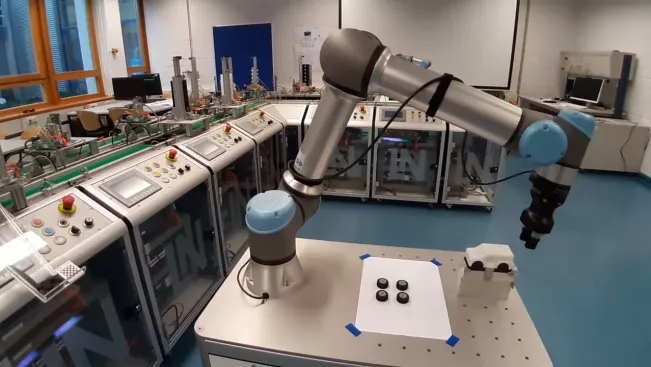
Im Labor für Industrielle Robotik werden die Studierenden an industrienahen Anlagen ausgebildet. Neben den Praktika werden auch interdisziplinäre Projekte durchgeführt, die oft auf den Ergebnissen vorangegangener Projekte aufbauen.

Das Labor besitzt unter anderem folgende Ausstattung:
- Kollaborativer Roboter (Cobot) UR5e von Universal Robots mit „Wrist Camera“ von Robotiq
- Autonomer Mobiler Roboter (AMR) vom Typ MiR100 mit festmontiertem Cobot (UR5e) inklusive „Wrist Camera“ und elektrischem Zwei-Backen-Greifer
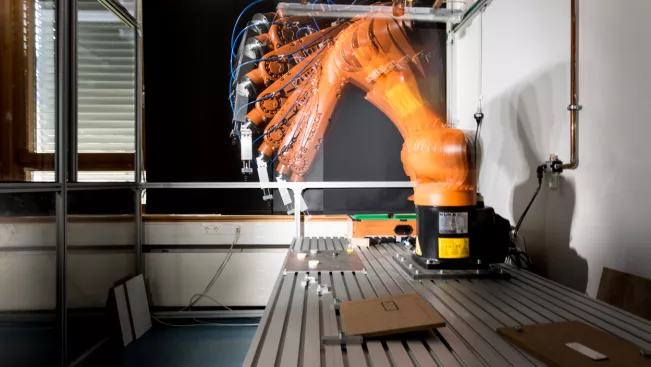
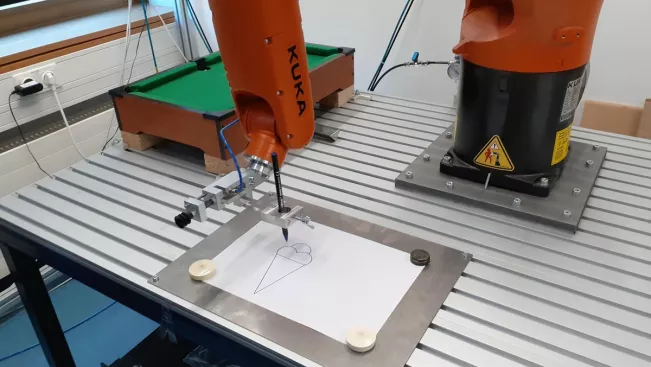
- 6-achsiger Knickarmroboter KR6 R900 sixx der Firma KUKA
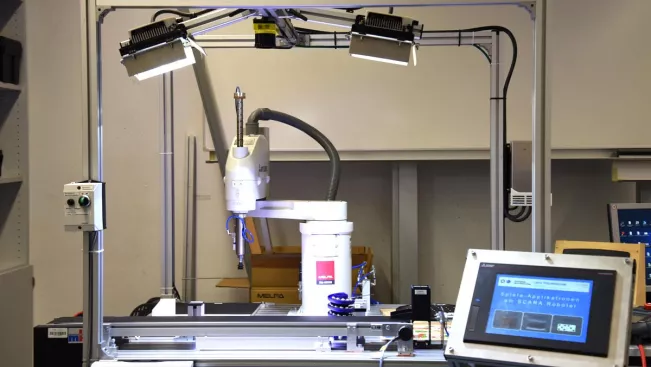
- 4-achsiger SCARA-Roboter RH-6SDH der Firma Mitsubishi
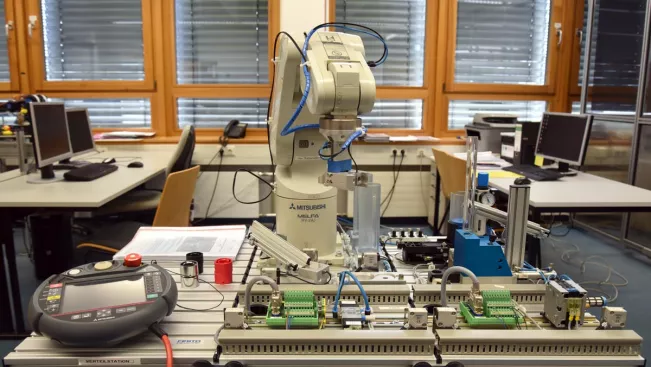
- 5-achsiger Knickarmroboter RV-2AJ der Firma Mitsubishi im Einsatz mit einer Montagestation von Festo Didactic
- 6-achsiger Knickarmroboter RV-1A der Firma Mitsubishi
- Diverse In-Sight Bildverarbeitungssysteme der Firma Cognex
- Mobiler Roboter „Lynx“ der Firma Omron (ehemals Adept)
- BCN3D Moveo (5-achsiger Knickarmroboter im Eigenbau mit 3-D-Druckteilen)
- Software „CIROS“ (Offline-Roboter-Programmier- und Simulationssystem mit Zellenmodulationsmöglichkeit und Online-Anbindung an den realen Roboter)
Die Hardware ist in einem laborinternen-Intranet über einen Switch miteinander vernetzt, so dass eine Kommunikation über Ethernet TCP/IP zwischen den PCs, Industrierobotern und Bildverarbeitungssystemen möglich ist.
Praktika
In den Praktika erlernen die Studierenden den Umgang mit Industrierobotern sowie deren Programmierung.
Hierzu setzen wir auch das Software-System CIROS ein, mit welchem eine Offline-Programmierung und Simulation des Roboterprogramms möglich ist.
Die Studierenden arbeiten zunächst mit der Simulation, um die Programmiersprache zu erlernen. Danach wird das Programm auf die reale Roboterzelle übertragen und kann dort in Betrieb genommen werden.
Auch das Erlernen der Programmierung und die Einbindung eines Bildverarbeitungssystems in eine Roboterzelle ist Teil der Praktika.

Projekte
Bei den Projekten bekommen die Studierenden immer wieder neue praxisgerechte Aufgabenstellungen, welche in interdisziplinären Teams systematisch unter Anwendung des Projektmanagements bearbeitet werden.
Die Aufgaben können sowohl Software-Erstellung als auch Hardware-Konstruktionen beinhalten.
Nach Durchführung der drei Projektwochen werden die Ergebnisse dokumentiert und anderen Studierenden präsentiert.
Projektbeispiel: Rädermontage in der "Smart Factory"
Kleine Auswahl an Projekt-Beispielen:
- Handling von Bauteilen, welche über ein Förderband in eine SCARA-Roboterzelle gelangen. Unter Anwendung der Mustererkennung eines Bildverarbeitungssystems von Cognex werden diese vom Roboter dann sortiert.
- Projektierung und Realisierung einer Applikation mit einem Mini-Billard-Spiel an einer Roboterzelle mit einem 6-achsigen Vertikal-Knickarm-Roboter von KUKA und einem Bildverarbeitungssystem von Cognex.
- Integration des Autonomen Mobilen Roboters in unsere „Smart Factory“, um Handhabungs- und Montageaufgaben zu lösen.
- Programmierung des Kollaborativen Roboters in Interaktion mit einem 5-achsigen Knickarmroboters zur Demontage eines zuvor zusammengebauten Pneumatik-Zylinders.
- Aufbau und Inbetriebnahme neuer Roboterzellen sowie deren Erweiterung.


Kontakt

Standort
Standort
Sankt Augustin
Adresse
Grantham-Allee 20
53757 Sankt Augustin

Standort
Sankt Augustin
Raum
B 221
Adresse
Grantham-Allee 20
53757 Sankt Augustin
Telefon
+49 2241 865 366