🎓Towards a Novel Interactive Reinforcement Learning Framework for Socially Assistive Robotics
Promotionsprojekt im Überblick
Fachbereiche und Institute
Zeitraum
01.01.2024 to 31.12.2028


Projektbeschreibung
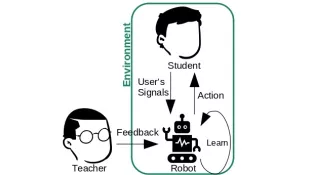
Derzeit sind viele Branchen und der öffentliche Sektor in Deutschland mit dem Problem des Fachkräftemangels konfrontiert. Daher ist es notwendig, verschiedene Berufsgruppen zu unterstützen, um die Effizienz der erbrachten Dienstleistungen zu steigern. Verschiedene Studien zeigen, dass Roboter in der Lage sind, unterschiedliche Nutzergruppen, z. B. ältere Menschen oder Schüler, zu unterstützen und damit die Arbeitsbelastung von Fachkräften, z. B. Pflegekräften oder Lehrern, zu verringern. In dieser Arbeit hat sich MICHAL STOLARZ dafür entschieden, den Bildungssektor zu unterstützen, um dem Lehrermangel entgegenzuwirken. Er entwickelt einen adaptiven Roboter, der internationale Schüler beim Erlernen der deutschen Sprache unterstützt, und untersucht dessen Eignung aus Sicht der Schüler. Bei diesem Ansatz lernt der Roboter, wie er nonverbale Reaktionen für den Schüler auf der Grundlage von zwei Informationsquellen anpassen kann: (i) implizite Signale des Schülers (z. B. Engagement, Emotionen, Müdigkeit) und (ii) explizites Feedback des Lehrers (z. B. über eine Registerkarte gegeben).