🎓Adaptive Exploration and Active Mapping for Forest Environmental Monitoring
Promotionsprojekt im Überblick
Fachbereiche und Institute
Zeitraum
01.09.2021 to 31.08.2026


Projektbeschreibung
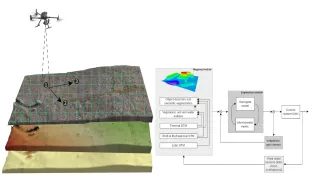
Climate change is driving severe forest decline in Europe; since 2018, prolonged drought and bark beetle infestations have caused major tree mortality, especially in Germany, where only 21% of surveyed trees show no damage. Replanting is vital for restoring ecosystems and reducing erosion, but manual efforts are too costly and logistically difficult, motivating scalable digital replanting supported by better monitoring. Conventional satellite and manned-aircraft remote sensing is often unsuitable due to limited spatial/temporal resolution and cloud interference. To address this, the project proposes using an autonomously guided UAV for adaptive exploration and active mapping of unknown forest terrains. The methodology features a multi-layered mapping system utilizing LiDAR, RGB, and multispectral cameras. It captures both visible objects and non-visible morphological data (like soil and water properties) to generate a highly detailed, probabilistic terrain map. To optimize the UAV's flight and data processing within its energy constraints, a simplified statistical "surrogate model" extracts key information to guide exploration. Ultimately, this framework provides the high-resolution, reliable data necessary for successful forest ecosystem restoration.