Forschung an der Hochschule Bonn-Rhein-Sieg
Forschungsdatenbank: Projekte
Forschungsprojekte (107)
Das Projekt Zentrum für Assistive Technologien Rhein-Ruhr (ZAT Rhein-Ruhr) ist eine umfassende Initiative, die sich auf die Schaffung eines nachhaltigen Ökosystems für assistive Technologien konzentriert. Es umfasst die Entwicklung der Infrastruktur, ethische Überlegungen, öffentliches Engagement und finanzielle Nachhaltigkeit, alles mit dem Ziel, die Forschung und Entwicklung, die Lehre und den Transfer von assistiven Technologien zu verbessern und so deren Breitenwirkung zu gewährleisten. Der Schwerpunkt der ZAT liegt auf pro-adaptiven Lösungen (Hilfsmittel, die “proaktiv die Anpassungsfähigkeit angehen”) in den Bereichen Arbeit, Wohnen, Gesundheit, Mobilität und Bildung. Das Projekt wird in Zusammenarbeit mit der Hochschule Rhein-Waal, der Hochschule Niederrhein und der Universität Duisburg-Essen durchgeführt. Das nordrhein-westfälische Ministerium für Kultur und Wissenschaft (MKW) fördert das Projekt mit 2,7 Millionen Euro für einen Zeitraum von drei Jahren.
Projektleitung an der H-BRS
Prof. Dr. Teena Chakkalayil Hassan Iman Awaad
Das Biometrie-Forschungsprojekt ergänzt die im Drittmittelprojekt „Biolab“ durchgeführten Arbeiten um hochschulspezifische Fragestellungen. Ziel ist, für Folgeprojekte im Rahmen des Biometrie-Evaluations-Zentrums anschlussfähig zu bleiben. Dabei sollen bestehende Ansätze aufgegriffen, optimiert und implementiert werden. Von besonderer Bedeutung sind hierbei die Evaluation bestehender biometrischer Systeme und die systematische Auswertung der Evaluationsergebnisse in Bezug auf Performanz und Schwachstellenanalyse. Ferner sollen geeignete künstliche Nachbildungen biometrischer Merkmale angefertigt und damit die Zuverlässigkeit der biometrischen Systeme gegenüber Präsentationsangriffen beurteilt werden. Auch Weiterentwicklung der biometrischen Systeme sollen durchgeführt werden. Die erzielten Ergebnisse werden in entsprechenden Veröffentlichungen der wissenschaftlichen Fachgruppe zugänglich gemacht.
Projektleitung an der H-BRS
Prof. Dr. Norbert Jung Prof. Dr. Robert Lange
Objectives Develop and implement a disruptive concept for automatically guided vehicles (AGVs) that lowers the still existing barrier in logistics by offering • cost-effective, automated or semi-automated indoor transportation of goods, • while coping with existing legacy in terms of size, shape, and weight of goods and containers, • without imposing disruptive changes in existing logistic solutions, such as rebuilding entire warehouses or switching to new containers or storage technology.
Projektleitung an der H-BRS
Prof. Dr. Erwin Prassler
Developer-centric Tools for Side-Channel Analysis
Projektleitung an der H-BRS
Prof. Dr. Kerstin Lemke-Rust
Medical Centre Employee Centered Information Security Awareness
Online-Fernausbildung für Montage, Betrieb und Wartung ist in der Industrie vorteilhaft, um Zeit und Geld zu sparen, insbesondere wenn Konzerne Standorte auf mehreren Kontinenten haben (z.B. Automobilindustrie, Ölfirmen, etc.). Derzeit sind die Ferntrainingserfahrungen durch begrenzte Kameraperspektiven und das Fehlen geeigneter Navigationstechniken für die Kameraansicht je nach Aufgabe eingeschränkt. In diesem Promotionsprojekt entwickelt Doktorand Saugata Biswas ein autonomes Kamera-Sichtpunktmanagementsystem mit Hilfe eines Roboterarms in einem Multikamera-Trainingsszenario. Diese Doktorarbeit wird sich auf die Verbesserung der Online-Trainingserfahrung von Remote Trainees konzentrieren.
Computergenerierte Bilder sind in unserer modernen, visuellen Welt allgegenwärtig. Fertigung, Unterhaltung, Bildung und viele andere Branchen benötigen reale oder fiktive virtuelle 3D-Modelle, um eine Vielzahl unterschiedlicher Szenarien darzustellen. Die moderne Computergrafik erzeugt hochqualitative visuelle und sogar fotorealistischen Inhalten. Diese Qualität hat jedoch zwei große Nachteile: Zum einen ist die Berechnung vieler visueller Effekte auf der Grundlage traditioneller Methoden ineffizient und mit langen Berechnungszeiten verbunden. Zweitens steigt mit zunehmender Bildqualität die Forderung nach einer extrem feinen Geometrie, die die gewünschte Szene darstellt. Daher ist eine der zeitaufwändige und mühsame Nachbearbeitung von Hand erforderlich. Ob einzelne Objekte oder ganze Szenen, jedes kleine Detail wird von Hand positioniert, einschließlich Geometrie, Lichtquellen oder Objektmaterialien. Doktorand Daniel Bachmannn macht sich tiefengenerative Ansätze mit neuronalen Netzwerken, insbesondere dem neuronalen Rendering zunutze. Hier werden Merkmale wie z.B. Form oder Farbe von virtuellen Objekten oder Szenen als gelernte Gewichte kodiert, die von neuronalen Netzen gespeichert werden. Diese interne Repräsentation wird als neuronale Szenenrepräsentation (NSR) bezeichnet - eine nicht-diskretisierende, implizite Form der Speicherung von Szenendaten.
Menschen sind in der Lage, Pläne zur Erreichung ihrer Ziele zu entwickeln und sie an Veränderungen in ihrer Umgebung anzupassen, indem sie ohne große Überlegungen Lösungen und Alternativen finden und Chancen nutzen. Trotz jahrzehntelanger Forschung sind künstliche Agenten, wie z.B. Roboter, nicht so robust und flexibel. Wenn wir uns ansehen, wie wir trotz der sich ständig verändernden Umgebungen und unseres eigenen Mangels an Allwissenheit die Dinge erledigen, stellen wir fest, dass dies meist dadurch erreicht wird, dass wir fehlende oder nicht verfügbare Objekte ersetzen und Annahmen über Objekte treffen, über die wir nur begrenzte Informationen haben. Doktorandin Iman Awaad hat sich zum Ziel gesetzt, Servicerobotern, die in häuslicher Umgebung arbeiten, die Nutzung dieser beiden Techniken zur Unterstützung menschlicher User zu ermöglichen.
Vier nordrhein-westfälische Hochschulen haben sich zusammengetan, um das „Games Technology Network“ (GTN) aufzubauen. Die Koordination hat die Hochschule Bonn-Rhein-Sieg (H-BRS) übernommen. Ihre Partner sind die RWTH Aachen, die Hochschule Düsseldorf und die Technische Hochschule Köln. Das Projekt ist auf zunächst drei Jahre ausgelegt und wird vom Zukunftsfonds NRW gefördert. Erklärtes Ziel des neuen Verbunds ist es, ein Netzwerk aus Forschungseinrichtungen und Industrieunternehmen aufzubauen, das die Spieletechnologie fördert und damit dem Standort NRW zugutekommt.
Projektleitung an der H-BRS
Prof. Dr. André Hinkenjann
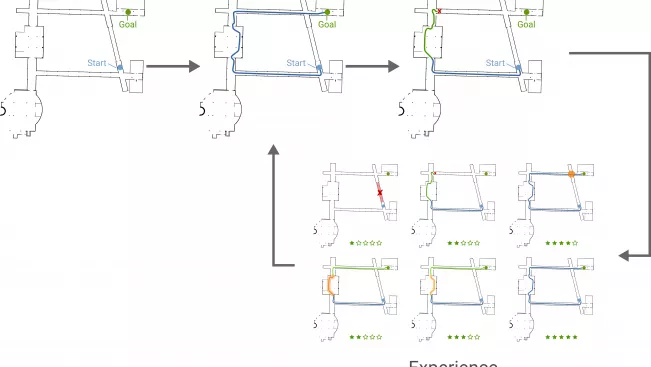
In Langzeiteinsätzen wiederholen Roboter ihre programmierten Aufgaben immer wieder und erstellen jedes Mal neue Pläne. Eines der Forschungsziele von Doktorandin Argentina Ortega ist es, zu untersuchen, wie Roboter ihre Planung verbessern können, indem sie Informationen aus ihren früheren Läufen verwenden. Aus diesen Informationen erstellt sie Erfahrungsmodelle, damit der Roboter seine früheren Pläne in optimierter Form wiederverwenden kann. Dies senkt die Bereitstellungskosten und erhöht gleichzeitig die Transparenz, Erklärbarkeit und den Systemdurchsatz.
Anlaufstellen
Ansprechpartner für die Forschungsdatenbank
Campus
Sankt Augustin
Raum
E233
Vizepräsident Forschung und Wissenschaftlicher Nachwuchs
Campus
Sankt Augustin
Zentrum für Wissenschafts- und Technologietransfer (ZWT)
Campus
Sankt Augustin
Raum
F 405
Links
Weiterführende Links